Dynamic Reconfigure of HARK parameters
Main Sheet Configuration
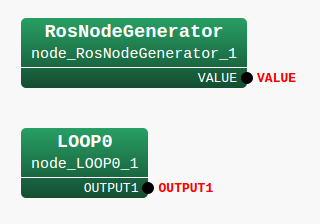
- Required Modules
- RosNodeGenerator
- LOOP0 (This appears after you create iterator sheet.)
RosNodeGenerator
All description is available at Publishing/Subscribing msg type Topics.
LOOP0
All description is available at Publishing/Subscribing msg type Topics.
Iterator Sheet Configuration
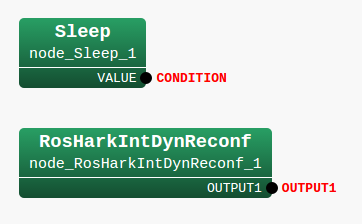
- Required Modules
- Sleep
- RosHarkIntDynReconf
Sleep
All description is available at Publishing/Subscribing msg type Topics.
RosHarkIntDynReconf
- Module Description
This module subscribes an integer from ROS dynamic reconfigure parameter server.
It displays and outputs the subscribed integer.
- Module Location
Node list > HARK:ROS:Sample > RosHarkIntDynReconf
- Property settings
| Name | Type | Value | Explanation |
|---|---|---|---|
| ROS_DURATION | float | 0.001 | Minimum interval of ROS topic subscription. |
ROS_DURATION is only valid if the ROS_DURATION is longer than HARK interval.
Set ROS_DURATION small value so that HARK can work with desired interval.
- Terminal settings
Set “OUTPUT1” for this output.
Examining the network file
Save the network file before closing [e.g.) RosHarkIntDynReconf.n ]
Open a new terminal and type
roscore
Go back to the previous terminal and run the HARK network file
./RosHarkIntDynReconf.n
Open a new terminal and type
rosrun rqt_reconfigure rqt_reconfigure
You’ll see a reconfigure GUI.
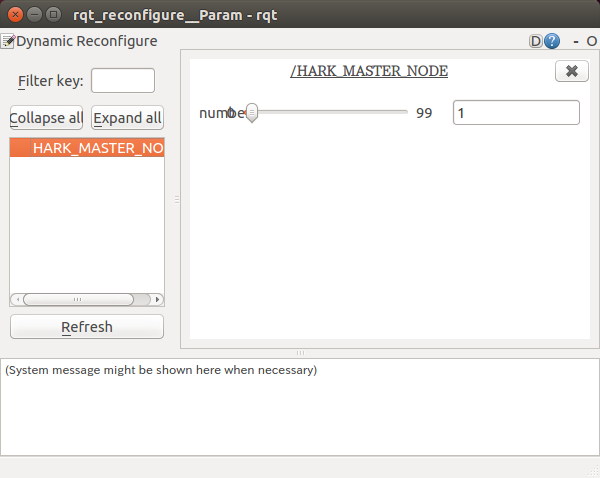
You can modify a parameter inside the RosHarkIntDynReconf from the GUI dynamically.
The standard output of the HARK network is something like following.
ROS node : HARK_MASTER_NODE generated... node_RosHarkIntDynReconf_1 initialized... [ INFO] [1289793120.876684240]: Received [1] [thread=0x923af18] ROS initialized... <Int 0 > node_RosHarkIntDynReconf_1 Subscribed [1] node_RosHarkIntDynReconf_1 Subscribed [1] [ INFO] [1289793129.366559703]: Received [2] [thread=0x91a1c38] node_RosHarkIntDynReconf_1 Subscribed [2] [ INFO] [1289793129.399733376]: Received [3] [thread=0x91a1c38] [ INFO] [1289793129.416073718]: Received [5] [thread=0x91a1c38] [ INFO] [1289793131.381853268]: Received [26] [thread=0x91a1c38] node_RosHarkIntDynReconf_1 Subscribed [26] node_RosHarkIntDynReconf_1 Subscribed [26]
This is an example when we set the parameter from 1 to 26 through the GUI.
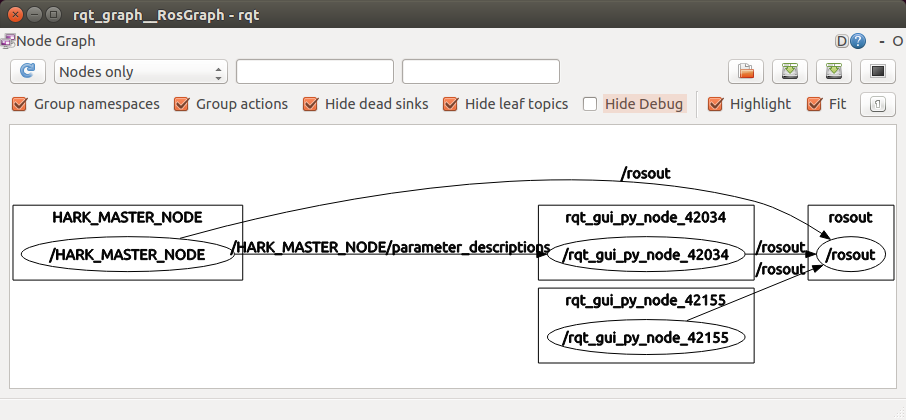
Now, let us check how the ROS system sees the HARK network by rqt_graph.
rosrun rqt_graph rqt_graph
When uncheck the “Hide Debug” on rqt_graph, you can see that the HARK_MASTER_NODE node accesses the dynamic reconfigure parameter server.